ART-Glove: Articulated Tactile Glove for Contact-Grounded Dexterous Interaction Capture
Carnegie Mellon University
arXiv preprint (arXiv:2606.16370), Computer Science > Robotics (cs.RO)
Abstract
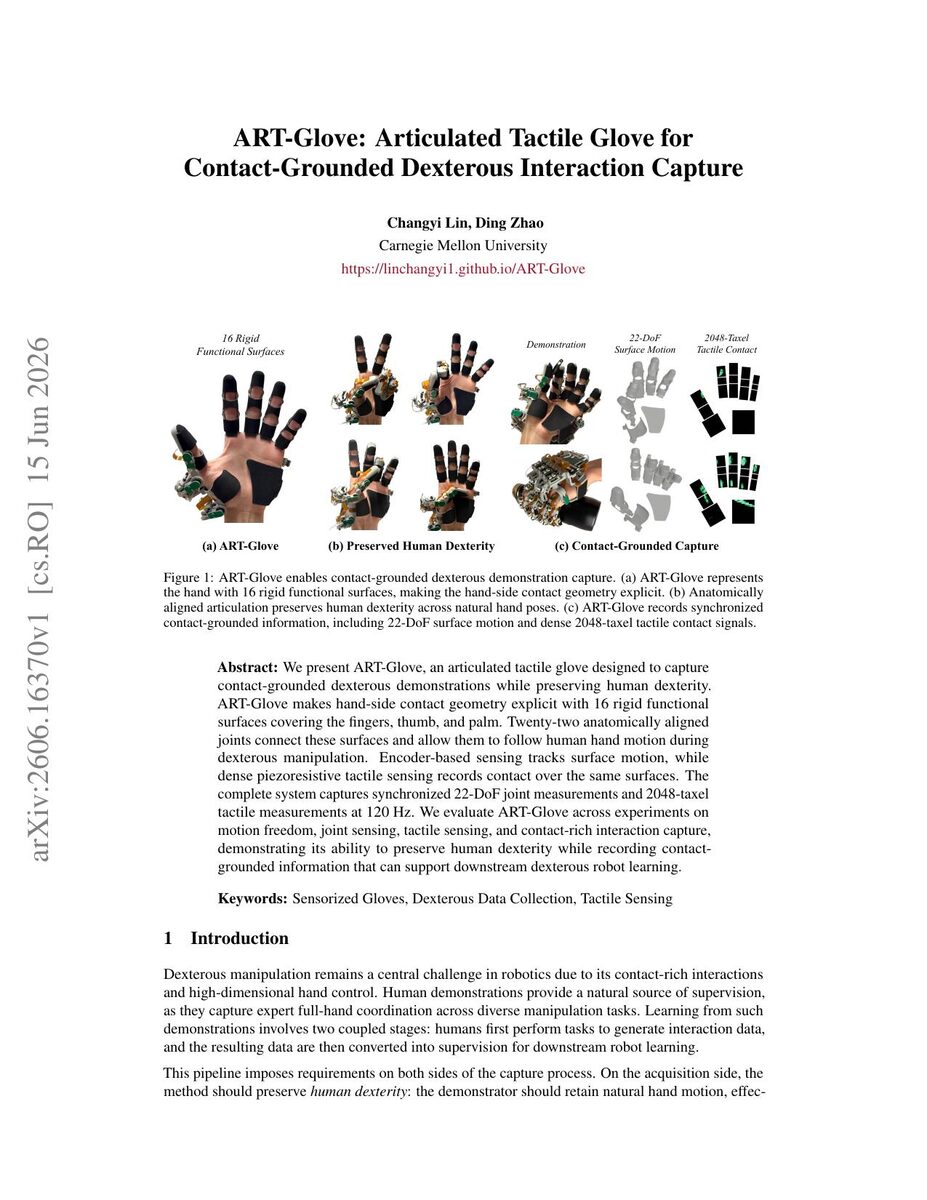
We present ART-Glove, an articulated tactile glove designed to capture contact-grounded dexterous demonstrations while preserving human dexterity. ART-Glove makes hand-side contact geometry explicit with 16 rigid functional surfaces covering the fingers, thumb, and palm. Twenty-two anatomically aligned joints connect these surfaces and allow them to follow human hand motion during dexterous manipulation. Encoder-based sensing tracks surface motion, while dense piezoresistive tactile sensing records contact over the same surfaces. The complete system captures synchronized 22-DoF joint measurements and 2048-taxel tactile measurements at 120 Hz. We evaluate ART-Glove across experiments on motion freedom, joint sensing, tactile sensing, and contact-rich interaction capture, demonstrating its ability to preserve human dexterity while recording contact-grounded information that can support downstream dexterous robot learning.