Robot Synesthesia: In-Hand Manipulation with Visuotactile Sensing
UC San Diego, Tsinghua University, Dongguk University
IEEE International Conference on Robotics and Automation (ICRA) 2024
Abstract
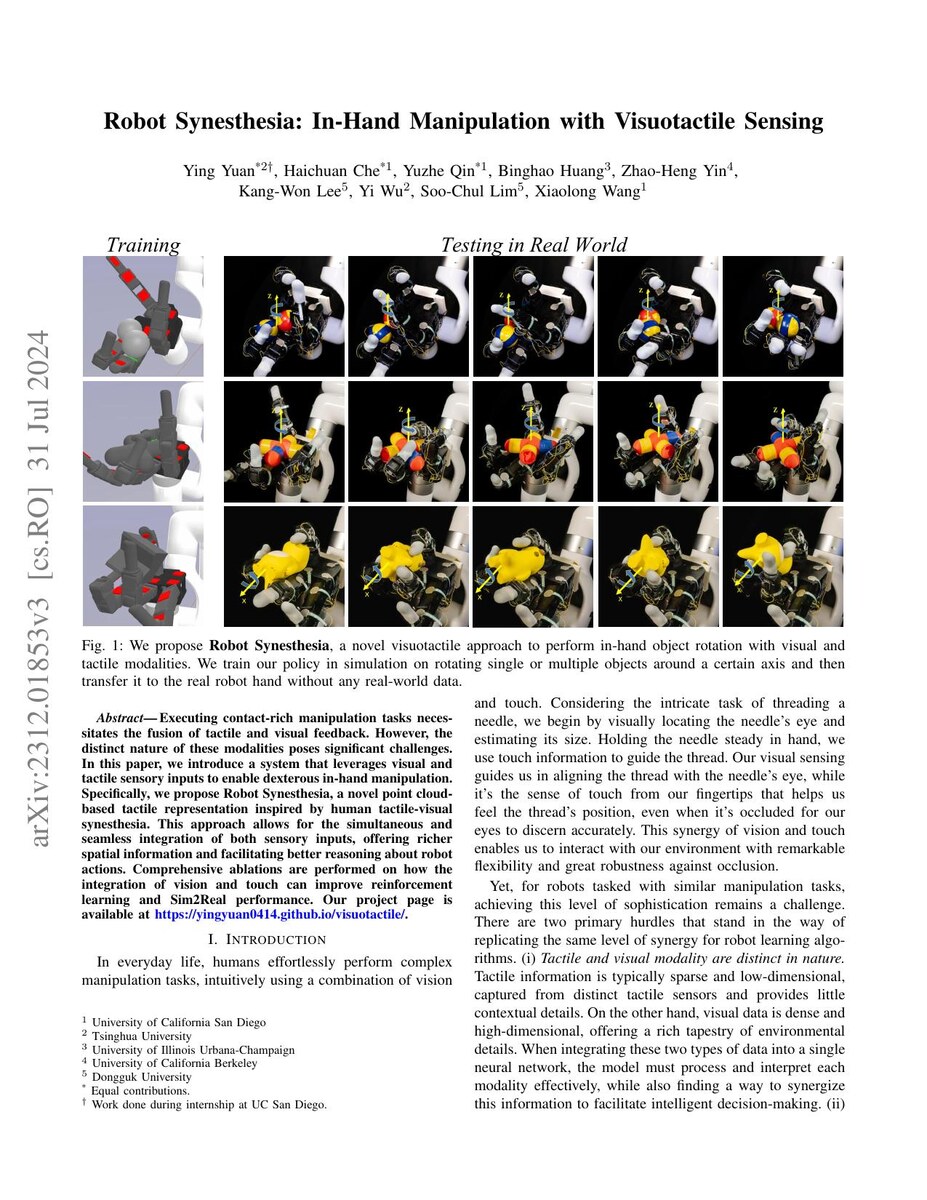
Executing contact-rich manipulation tasks necessitates the fusion of tactile and visual feedback. However, the distinct nature of these modalities poses significant challenges. In this paper, we introduce a system that leverages visual and tactile sensory inputs to enable dexterous in-hand manipulation. Specifically, we propose Robot Synesthesia, a novel point cloud-based tactile representation inspired by human tactile-visual synesthesia. This approach allows for the simultaneous and seamless integration of both sensory inputs, offering richer spatial information and facilitating better reasoning about robot actions. The method, trained in a simulated environment and then deployed to a real robot, is applicable to various in-hand object rotation tasks. Comprehensive ablations are performed on how the integration of vision and touch can improve reinforcement learning and Sim2Real performance.